feat(project): Initialize UR16e pick and place project#6258
Open
henry2craftman wants to merge 3 commits intoUnity-Technologies:developfrom
Open
feat(project): Initialize UR16e pick and place project#6258henry2craftman wants to merge 3 commits intoUnity-Technologies:developfrom
henry2craftman wants to merge 3 commits intoUnity-Technologies:developfrom
Conversation
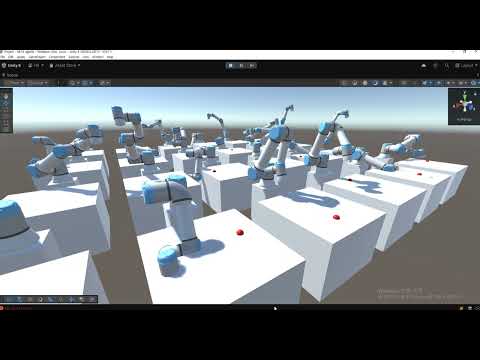
This is the initial commit for the UR16e pick and place project using Unity ML-Agents. This project is built upon a clone of the standard Unity ML-Agents repository and introduces a specific implementation for training a UR16e robotic arm. Key additions in this commit: - UR16Agent: A new ML-Agent script (`UR16Agent.cs`) designed for the pick and place task. It defines the agent's observations, actions, and reward structure. - Unity Scene: The `UR16 agents.unity` scene, which contains the robot, target objects, and environment setup for training. - Documentation: Multilingual README files (`README.md` for English, `README.ko.md` for Korean) explaining the project's purpose, structure, and how to run it.
|
|
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
2 participants
Add this suggestion to a batch that can be applied as a single commit.This suggestion is invalid because no changes were made to the code.Suggestions cannot be applied while the pull request is closed.Suggestions cannot be applied while viewing a subset of changes.Only one suggestion per line can be applied in a batch.Add this suggestion to a batch that can be applied as a single commit.Applying suggestions on deleted lines is not supported.You must change the existing code in this line in order to create a valid suggestion.Outdated suggestions cannot be applied.This suggestion has been applied or marked resolved.Suggestions cannot be applied from pending reviews.Suggestions cannot be applied on multi-line comments.Suggestions cannot be applied while the pull request is queued to merge.Suggestion cannot be applied right now. Please check back later.
Proposed change(s)
Description
This PR establishes the initial framework for the UR16e Pick and
Place project within the ML-Agents repository. It introduces the
core components required to train a UR16e robotic arm for a
pick-and-place task using reinforcement learning.
Key Changes
UR16Agent.cs): A new agent script hasbeen added to manage the robot's learning process. It defines
the state observations, action space, and reward function
tailored for the pick-and-place task.
UR16 agents.unity): A dedicated Unityscene is included, featuring the UR16e robot, the target object,
and the necessary ML-Agents components for training and
inference.
README.md,README.ko.md): Comprehensivedocumentation has been added in both English and Korean. The
READMEs explain the project's purpose, structure, and provide
clear instructions on how to get started and run the simulation.
Purpose
The goal of this PR is to formally initialize the project and
provide a solid foundation for future development and
experimentation with the UR16e robot. By adding the core logic
and documentation upfront, it makes the project accessible and
understandable for other contributors.
How to Test
compatible).
the new README files.
Vidoes




Useful links (Github issues, JIRA tickets, ML-Agents forum threads etc.)
Types of change(s)
Checklist
Other comments