diff --git a/README.md b/README.md
index 80cca33..87e9c60 100644
--- a/README.md
+++ b/README.md
@@ -2,7 +2,7 @@
This demo illustrates the micro-ROS capabilities and showcases the integration of micro-ROS with ROS 2 tools. Besides, it enables the comparison of micro-ROS and ROS 2 outcomes.
-The use-case consists in a ROS2-controlled [Raspberry Pi 4](https://www.raspberrypi.org/products/raspberry-pi-4-model-b/?resellerType=home) with a [TFMini](https://www.sparkfun.com/products/14588) sensor that measures the distance to a target object and a micro-ROS-controlled [Olimex STM32-E407](https://www.olimex.com/Products/ARM/ST/STM32-E407/open-source-hardware) board with the similar TFMini sensor, which measures the distance to the same object. The demo explores another micro-ROS-controlled Olimex STM32-E407 board, which measures the power consumption of both Raspberry Pi 4 and Olimex STM32-E407 boards for distance measurements, using [INA219](https://www.antratek.com/ina-219-dc-current-sensor) sensors. The last component, a tablet display, visualizes measurement results using standard ROS 2 tools (rqt).
+The use-case consists in a ROS2-controlled Raspberry Pi 4 with a TFMini sensor that measures the distance to a target object and a micro-ROS-controlled Olimex STM32-E407 board with the similar TFMini sensor, which measures the distance to the same object. The demo explores another micro-ROS-controlled Olimex STM32-E407 board, which measures the power consumption of both Raspberry Pi 4 and Olimex STM32-E407 boards for distance measurements, using INA219 sensors. The last component, a tablet display, visualizes measurement results using standard ROS 2 tools (rqt).
Raspberry Pi 4 is running Linux and a ROS 2 application, while Olimex STM32-E407 boards are running NuttX and micro-ROS applications.Both of them are publishing sensor messages via UDP over Ethernet LAN sending distance and power data to the display. The tablet is running Linux, ROS 2 and a [micro-ROS agent](https://micro-ros.github.io/docs/overview/) to receive these messages.
@@ -258,7 +258,7 @@ Connect the devices via an Ethernet switch and power them on, then run the comm
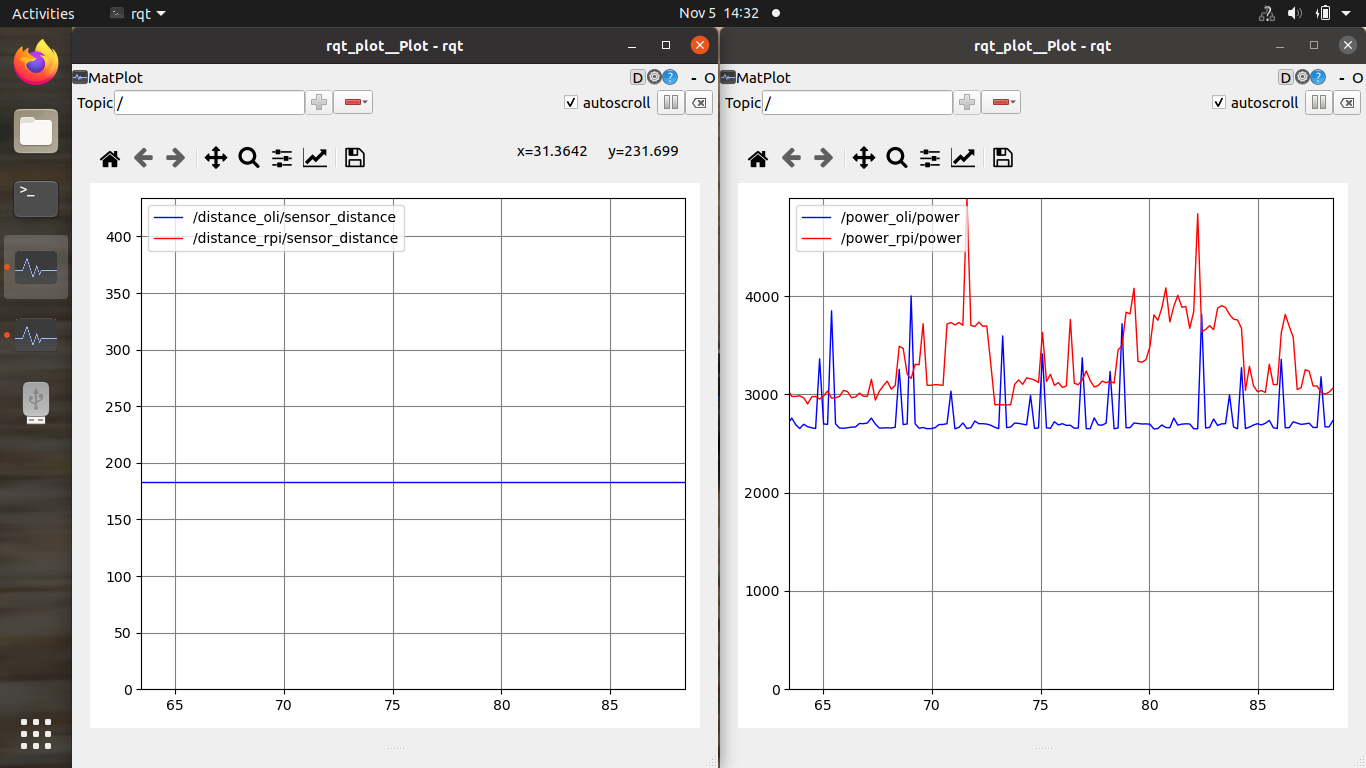
After some time two rqt windows should appear with sensors data histograms.
-
+
## License
@@ -266,7 +266,7 @@ After some time two rqt windows should appear with sensors data histograms.
This repository is open-sourced under the Apache-2.0 license. See the LICENSE file for details.
For a list of other open-source components included in this repository, see the
-file [3rd-party-licenses.txt](./3rd-party-licenses.md)
+file [3rd-party-licenses.txt](https://raw.githubusercontent.com/micro-ROS/micro-ROS_demobox_demo/master/3rd-party-licenses.md)
## Known Issues/Limitations